* 일단 하드웨어 구성에 앞서 현재 사조기는 2대가 있다. 하드웨어가 완성된 M1(검정색)과 현재 제작 중인 M2(Y,G,W)가 있다. 아직 M2의 새로운 머리와 라이다 장착할 변형된 등을 제작하지 않아 완성될 때까지 이미지는 M1과 M2가 섞여서 올라갈 예정이다.*
이전 포스트에서 언급했듯이 기본적인 프레임은 KDY0523 모델을 이용한다.
https://maltese-rocks.tistory.com/42
SAJOGI M2: 부품 LIST
2021년 가을 시작했던 프로젝트. 기존 Raspberry Pi OS에서 진행했으나 Ubuntu Core 기반으로 혼자 처음부터 다시 제작하고자 한다. 이전에는 직진 보행만 성공했었다. 이번 프로젝트에서는 ROS 기반으로
maltese-rocks.tistory.com
조립 이미지는 알록달록한게 M2, 까만게 M1의 이미지이다.
<프린트한 부품들>

<프레임 조립>
<1차 가조립>
<1차 완조립>
<전자부 연결 후 완조립(뚜껑X)>

전자부의 회로 연결은 아래와 같다. 위 이미지에서는 아직 라이다 및 카메라가 설치되지 않은 상태이다.
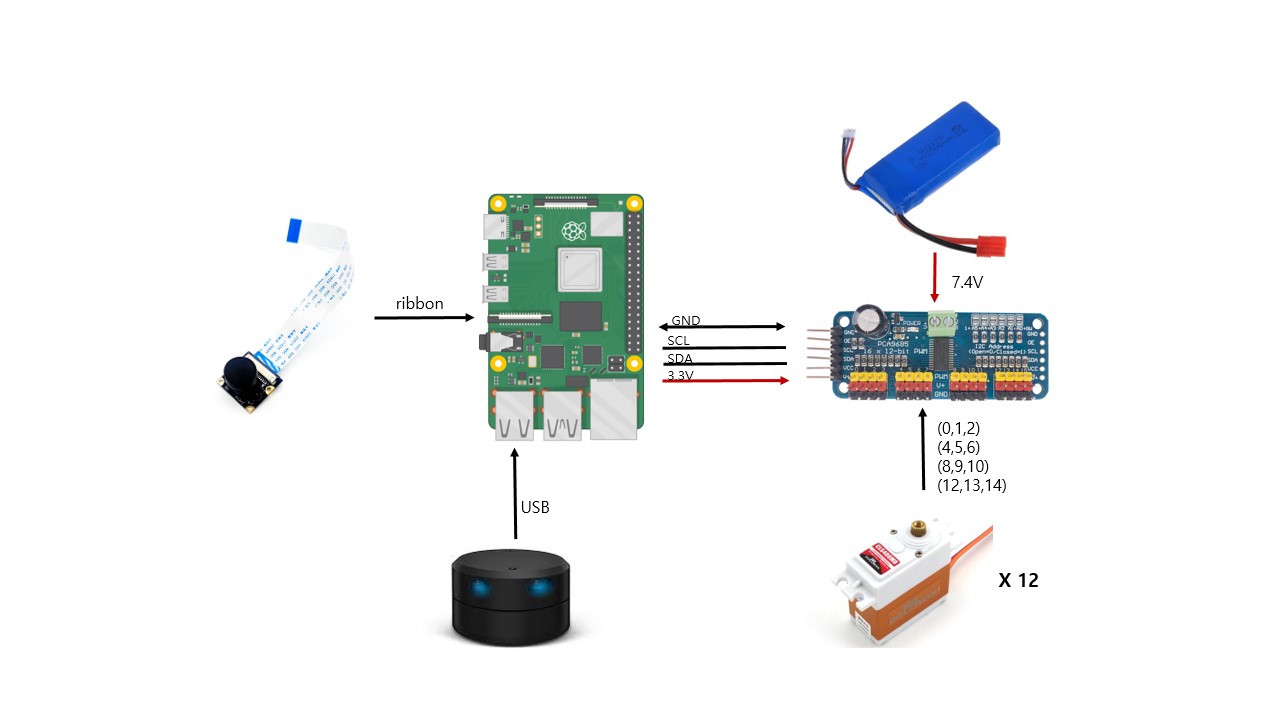
회로 자체는 크게 복잡하지 않다. PCA9685의 capacitor 부분에 기본적으로 470μF capacitor가 장착되어있는데 이를 제거하고 12개 모터이므로 약 1200μF 가량의 capacitor로 교체해주어야 한다.
반응형
'ROBOTICS > SpotMicro SAJOGI M2' 카테고리의 다른 글
| SAJOGI M2 : Camera, LiDAR and Motor (0) | 2022.10.09 |
|---|---|
| SAJOGI M2: 부품 LIST (0) | 2022.10.07 |


댓글